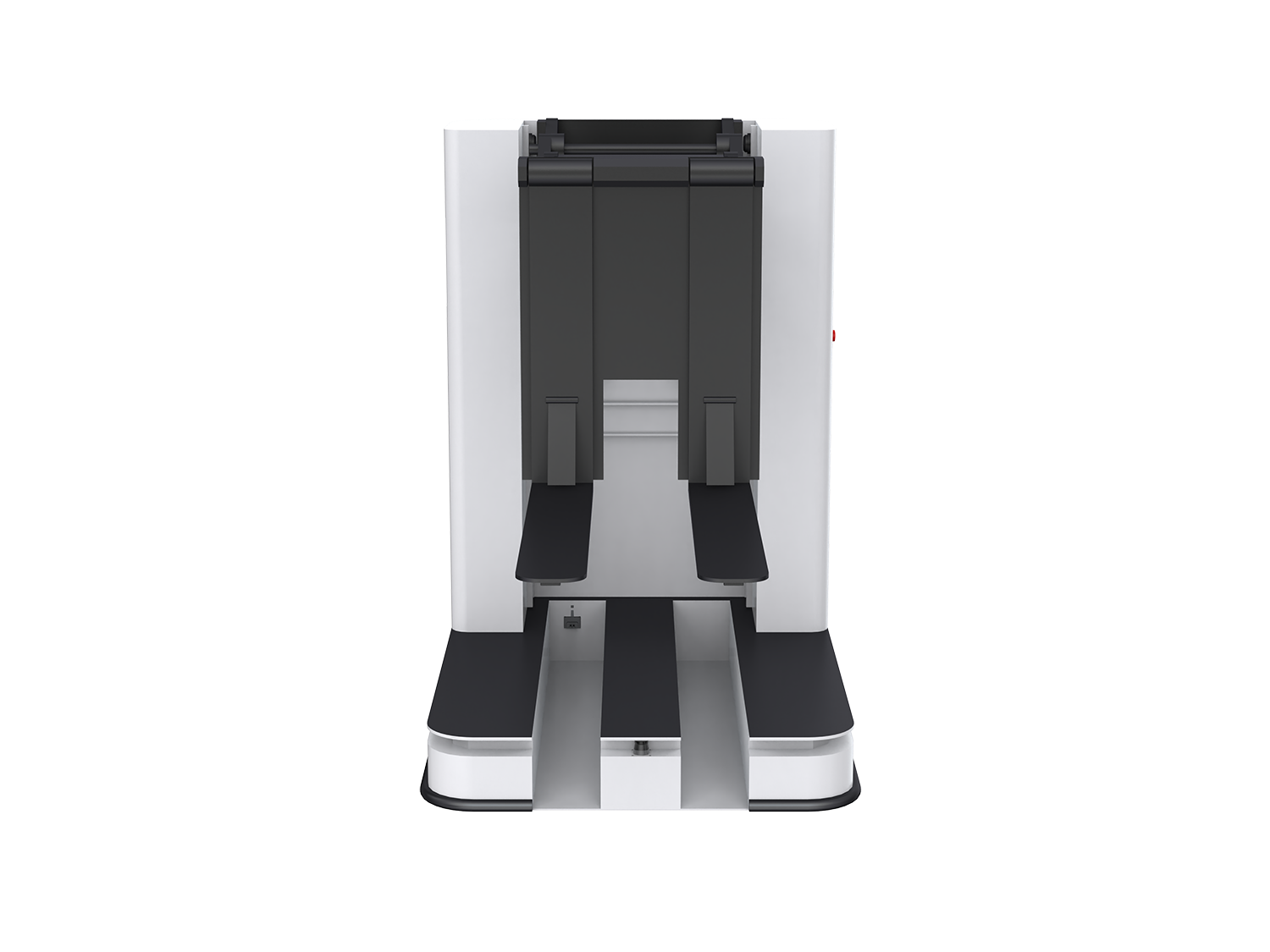
月光モバイルフォークリフト
MF1013
MF1013は2輪差動式AMRのプラットフォームの上に動くフォークリフト、貨物を持った後に前後に走行するAMFである、通路の中には進入してから本体を回転する必要があります、1100×1100パレットを搬送時の荷役通路幅が2200mm必要ですが、通路の中で回転できるため、左右両サイドの棚へアクセスは可能、本体と棚の距離をも簡単に調整可能。爪がパンタグラフ式のリーチ機構で伸縮が可能、田の字パレットや両面パレットにも対応しています。床から床への移動や、床と装置の間の移動も対応できるように設計しました。プラットフォームのナビゲーション精度は±10mm、ドッキング精度は±5mmを実現しています。持ち上げはボールねじ式でリフトチェーンではないため、動作油の漏れの心配がありません。オプションでシャーシをオールステンレス仕上げにカスタイマイズし、クリーンルーム内、class100の環境でご使用できるように調整可能。なお、MF1013は自由自在に移動できるフリーモードを使えば、障害物を避けて走行することができます。



FMCW-Lidarを搭載
高精度、高分解能力である次世代Lidar、FMCW-LIDARを搭載することでよる環境の識別能力を従来のLidarより高く、また、霧や雨、粉塵やヒュームなどがある環境でも動いているものに左右されず、環境のみを正確に識別できます、自社開発のアルゴリズムとの組み合わせで検知した情報をフィルタリングすることで金属加工の現場や溶接の現場、塗装の現場など、埃を舞うような劣悪な環境でも安定した走行を実現しています。

ハイブリッド式ナビゲーション
レーザーSLAMナビゲーションの中に、グリッド式ナビゲーションと反射板ナビゲーションを混合することでそれぞれのナビゲーションの長所をいかすことが可能、SLAM式の点群マップの中に、エリアを指定するだけです、グリッド式エリア内は100%の環境変化に対応可能。床にQRコードを貼れない場所は、Lidarが当たる場所に反射板を付ければ、反射板のみでのナビゲーションも可能。また、それぞれのナビゲーション方式の切り替え時間は1秒以内!なお、SLAMのみのナビゲーションエリアでも停止精度が±10mm、ドッキング精度が±5mmを実現をし、70%の環境変化に対応可能。月光AMFは、ルート上での走行とルートが敷かれていないエリアでのフリー走行、組み合わせが可能。

AMRの制御をすべてオープン
PLCからでもAPIからでも、AMFのすべての動きを制御可能、また、あらかじめ用意してあるI/Oを使用された場合、I/Oの制御もできます。誰でも単体制御ソフトや複数台制御システムを開発することができます。また、MESやWMS、外部システムからの指示でダイレクトにAMFを動かすことができます。

両面パレットにも対応
ユーロパレット、ステンレスパレット、網パレット、かご台車など以外に、物流現場で汎用の田の字パレットにも対応。また、両面パレットにも対応しています、チルト、スライド、爪間隔自動調整などの機能は追加可能。

狭い通路を通過可能
全体設計を最適化し、車体幅はバンパーセンサーを含めてわずか1300mmに仕上げました、通路幅1500mmのような狭いところも通行可能。

2輪差動式プラットフォーム
2輪差動式AMRのプラットフォームを使用し、横移動はできませんが、前後の移動や転回、スピンターンもできます、爪の伸縮方向とAMRの走行方向は一致しているため、通路の中に入ったあと、回転してから荷物を取ったり卸したらできる、必要荷役通路幅は回転するために、1100×1100パレット搬送時は2200mmが必要ですが、左右の棚や前後の棚、あらゆる方向にアクセスできます。なお、下向きカメラを利用することで指定位置に±5mmの高い精度で停止することができる。

パンダグラフ式フォーク
パンダグラフ式フォークで通常のカウンターバランス式と同じ物流現場の多種類のパレットに対応可能、伸縮可能なため、本体が動かずにパレットを取ったり卸したりできるため、通常のリーチフォークより動作が安定しています。また、パンダグラフ式フォークの移動距離を延ばすことで、手前と奥、2段パレットの運用もでき、1つの通路でいままでの倍の収納を実現することができる

360°障害物検知
本体の下部4面に各1つのLidarを搭載しており、障害物検知範囲は360°、死角なし。センサーの有効範囲は調整可能、また、エリアを任意に指定しそのエリア内のセンサーの有効範囲を自由自在に設定できます。

簡単にセットアップ
PCのIPをAMFに合わせるだけで、AMFを単体制御システムに車両登録が可能で、登録後、マッピング、ルート作成、タスク作成、だれでも簡単にできます。10分程度でロボットを点から点への自動走行の設定ができます。また、一台だけではなく、登録された複数台のAMFの設定も同時に行えます。AMF同士の間ではマップの共有、タスクの設定など、すべては1つの画面で行えます。さらに、同じ画面で床にQRコードを貼った点をグリッド式ナビゲーション用のマーカーとして設定可能、すべては点のプロパティの中の設定作業だけで完結します。
製品規格
● 標準 ○ オプション
| 型番 | MF1013 | |
| 外観 | 色 | 白、グレー |
| シャーシ材質 | スチール | Q235 標準 |
| ステンレス | SUS304、SUS316 オプション | |
| ナビゲーション | レーザーSLAM(室内) | ● |
| 通信 | Wi-Fi5 | ● |
| 基本スペック | 寸法(mm) | 幅1300x奥行き1750x高さ1985 |
| 可搬重量(kg) | 1000(カスタイマイズ可能) | |
| 持ち上げ高さ(mm) | 1300(カスタイマイズ可能) | |
| 車体旋回直径(mm) | 2000 | |
| 自重(kg) | 1400 | |
| 最小通路幅(mm) | 1500 | |
| 最小荷役通路幅(mm) | 2200 | |
| 適応温度 | 0℃〜50℃、冷凍タイプは-25℃〜45℃ | |
| 運動性能 | 走行機能 | 前後、転回、スピンターン、障害物自動避け |
| 停止精度(距離) | ±10mm | |
| 停止精度(角度) | ±1° | |
| ドッキング(mm) | ±5 | |
| Max走行速度(m/s) | 1.5m/s | |
| 爪前後移動速度 | 1.8m/min | |
| 爪上下昇降速度 | 1.2m/min | |
| 乗り越え段差(mm) | ≤10(カスタイマイズ可能) | |
| 乗り越え幅(mm) | ≤30(カスタイマイズ可能) | |
| 坂道能力(%) | 5(20%までカスタイマイズ可能) | |
| 安全機能 | マニュアル操作(手動コントローラー) | ● |
| ルートずれ保護、位置ずれ保護 | ● | |
| 部品故障保護、通信障害保護 | ● | |
| 障害物検知センサー(360°) | ● | |
| 緊急停止ボタン | ● | |
| バンパーセンサー | ● | |
| 音声と光のインジゲーター | ● | |
| HMIインターフェース | ● | |
| バッテリー | バッテリータイプ | リン酸鉄リチウム |
| 標準バッテリー容量(Ah) | 48V/150Ah | |
| 充電方法 | 自動接触式/手動(非接触:オプション) | |
| 充電時間/平均稼働時間 | 2h/8h | |
| 車輪 | 材質 | ウレタン樹脂 |
| プラットフォーム駆動輪 | 2輪差動式、駆動輪x2、補助輪x4 | |
| フォーク | フォーク | パンダグラフ式伸縮フォーク |
| 外部連携 | プロトコル | Modbus、API(VDA5050) |
| 各種認証 | ISO3691-4、2023版 | ○オプション |
| CE、UL | ○オプション | |
| EUCC | ○オプション | |