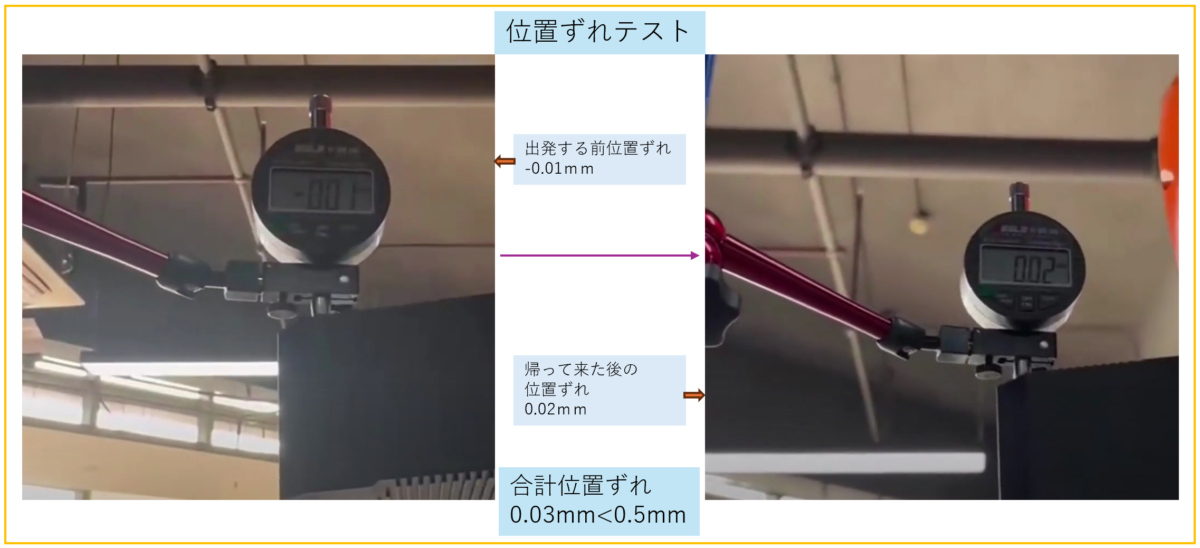
自動搬送ロボットの停止誤差、±0.5mm以下、どうやって実現するのか 自動搬送ロボットの停止誤差、±0.5mm以下、どうやって実現するのかSLAM式月光AMRの停止誤差は±5mmですが、自社開発した専用装置で停止後機械的に位置矯正することによって、誤差を0.5mm以下に抑えることが可能に!実測繰り返し誤差は0.05mm!保証値±0.5mm!停止後の産業ロボットはカメラセンサーでの矯正で最高精度0.09mm、0.1mm以下の精度を実現できましたが、AMR本体では機械による位置矯正で0.03mm、より高い精度を得ることができました。 gekkou2025-01-05T07:53:35+09:00