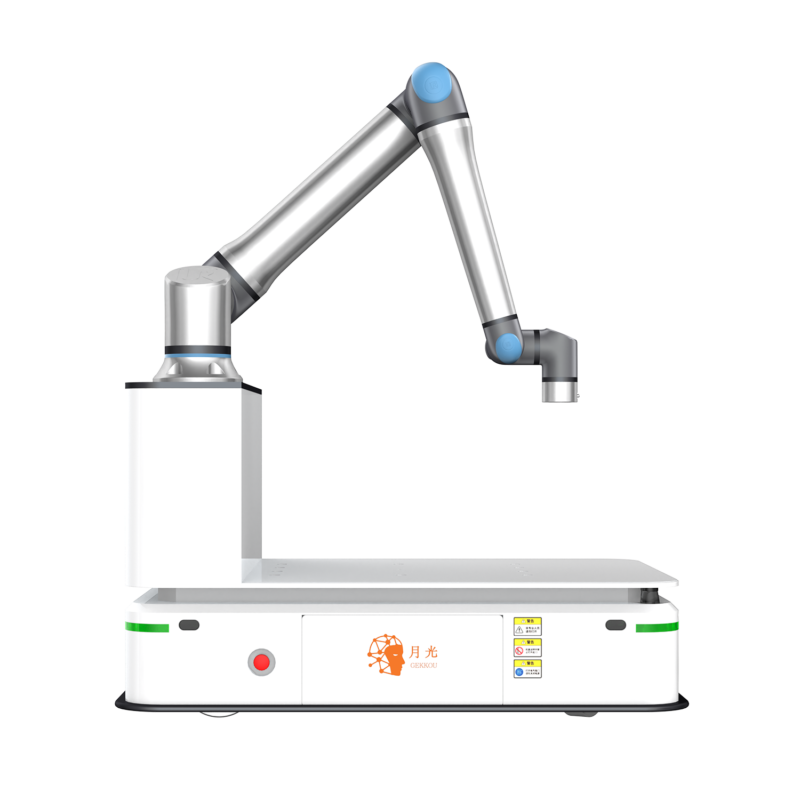
月光COBOT
低床型
全方向移動
4輪駆動
前後左右斜め、任意の方向に
各種協働ロボットを搭載可能
軽量型~50㎏の協働ロボット
ほぼすべての協働ロボットを搭載可能
低床型
広い空間でワークを多数搬送可能
複数のワークを乗せて製造ラインとの移載が可能




ハイブリッド式ナビゲーション
レーザーSLAMナビゲーションの中に、グリッド式ナビゲーションと反射板ナビゲーションを混合することでそれぞれのナビゲーションの長所をいかすことが可能、SLAM式の点群マップの中に、エリアを指定するだけです、グリッド式エリア内は100%の環境変化に対応可能。床にQRコードを貼れない場所は、Lidarが当たる場所に反射板を付ければ、反射板のみでのナビゲーションも可能。また、それぞれのナビゲーション方式の切り替え時間は1秒以内!なお、SLAMのみのナビゲーションエリアでも停止精度が±10mm、ドッキング精度が±5mmを実現をし、70%の環境変化に対応可能。月光AMRでは、ルート上での走行とルートが敷かれていないエリアでのフリー走行、組み合わせが可能。


AMRの制御をすべてオープン
PLCからでもAPIからでも、AMRのすべての動きを制御可能、また、あらかじめ用意してあるI/Oを使用された場合、I/Oの制御もできます。協働ロボットの動きと組み合わせた動作を自由自在に設計可能。また、MESやWMS、外部システムからの指示でダイレクトにAMRを動かすことができます。
低床型のメリット
プラットフォームが低いため、複数のプラコンを積み重ねてからの搬送や生産ラインとの移載、ローラーコンベア以外に、一度に複数のワークの移載ロボットとしても活用できる、また、低いところから棚を設けて、多数のワークを格納してからの搬送など、使い道はさまざま、SLAMナビゲーションで走行精度が±10mm、ドッキング精度は±5mm、専用装置で矯正し±0.1mm以下を実現、停止後、協働ロボット+カメラセンサーでの作業精度は0.1mm以下、全体的に作業精度の高い移動式マニピュレーターである。


簡単にセットアップ
PCのIPをAMRに合わせるだけで、AMRを単体制御システムに車両登録が可能で、登録後、マッピング、ルート作成、タスク作成、だれでも簡単にできます。10分程度でロボットを点から点への自動走行の設定ができます。また、一台だけではなく、登録された複数台のAMRの設定も同じ画面から行えます。さらに、同じ画面で床にQRコードを貼った点をグリッド式ナビゲーション用のマーカーとして設定可能、すべては点のプロパティの中の設定作業だけで完結します。
製品規格
● 標準 ○ オプション — 無し
| 製品名 | COBOT-low-floor | |||
| ナビゲーション | レーザーSLAM(室内) | ● | ||
| 通信 | Wi-Fi5 | ● | ||
| 5G | ○ | |||
| 基本スペック | プラットフォームの可搬重量(kg) | 400~ | ||
| 最小旋回半径(mm) | 500~ | |||
| 自重(kg) | 250~ | |||
| 幅x奥行きx高さ(mm) | 600x950x650(協働ロボットを除く)~ | |||
| プラットフォームの高さ(mm) | 300 | |||
| 運動性能 | 走行機能 | 全方向移動 | ||
| 停止精度(mm) | ±10 |
|||
| ドッキング精度 | ±5 | |||
| 走行速度(m/s) | Max1.5m/s | |||
| 乗り越え段差(mm) | ≤10 | |||
| 乗り越え幅(mm) | ≤30 | |||
| 坂道能力(%) | 3 | |||
| 安全機能 | 手動(端末より) | ● | ||
| ルートずれ保護、位置ずれ保護 | ● | |||
| 部品故障保護、通信障害保護 | ● | |||
| 360°障害物回避(デュアルLidar) | ● | |||
| 接近センサー(8個) | ● | |||
| 緊急停止ボタン | ● | |||
| 音声と光のインジゲーター | ● | |||
| HMIインターフェース | ● | |||
| バッテリー性能 | 充電方法 | 自動/手動 | ||
| バッテリータイプ | リン酸鉄リチウム | |||
| 標準バッテリー容量(Ah) | 48V/100Ah | |||
| 充電時間/平均稼働時間(h) | 1.5h/8h | |||
| コンセント規格 | 単相交流200Vx20A | |||
| 車輪 |
車輪材質 | ウレタン樹脂 | ||
| 駆動輪 | 4個 | |||