GNSS+RTK
GNSS-全地球航法衛星システム(Global Navigation Satellite System)
全地球測位航法衛星システムには、日本のQZSS、アメリカのGPS、ロシアのGLONASS、欧州委員会のGalileo、中国のBeiDou 、インドのIRNSSがあります。グローバル軌道衛星群であるこれらの衛星を利用することで、地球上のほぼ全ての場所で現在位置を計測することができます。
RTK-リアルタイムキネマティック(Real-time kinematic)
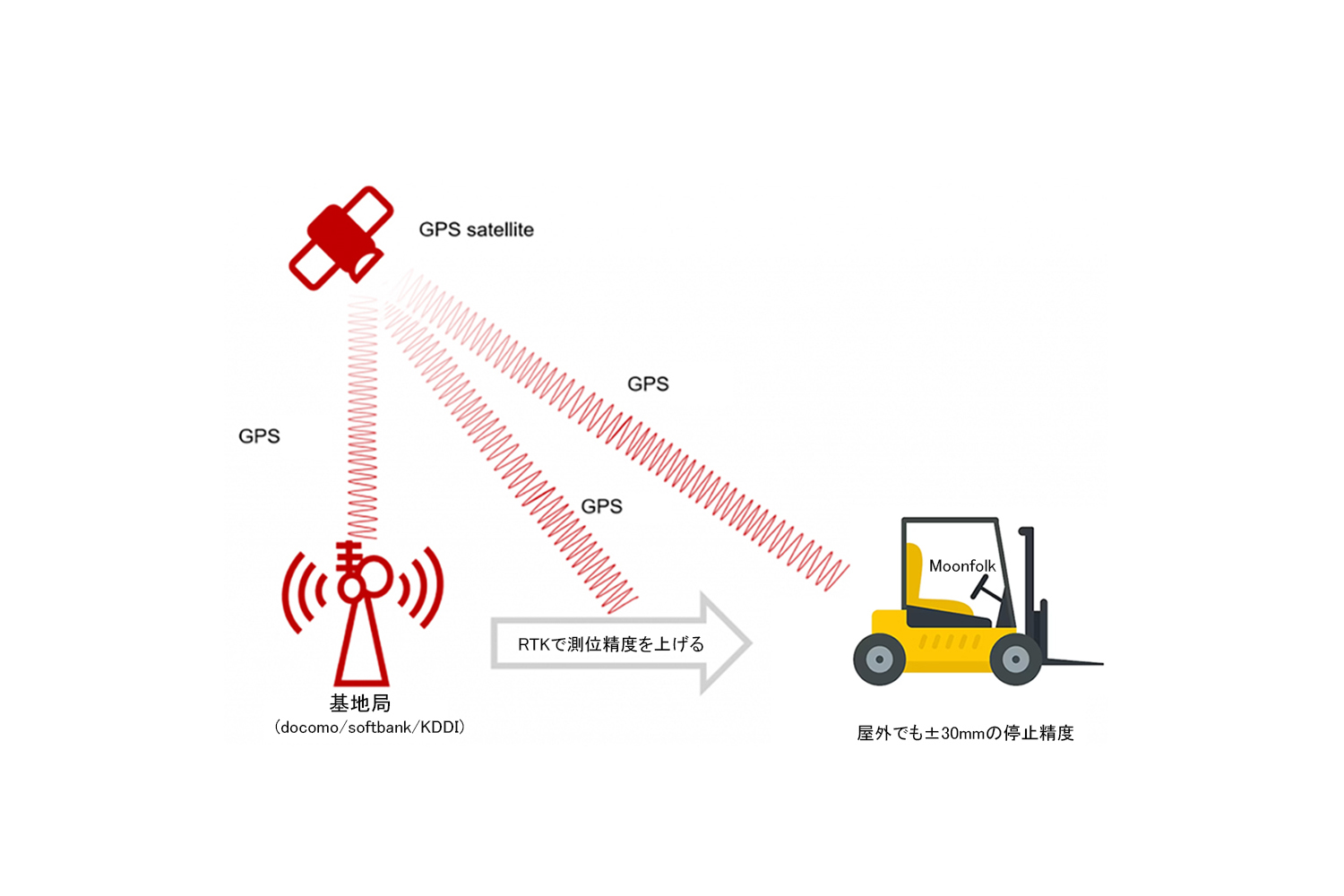
既存の衛星測位システム(GNSS)から得られた位置情報に加え、地上に設けた独自の基準局の補正位置情報を加味し、位置情報の精度を上げる技術。
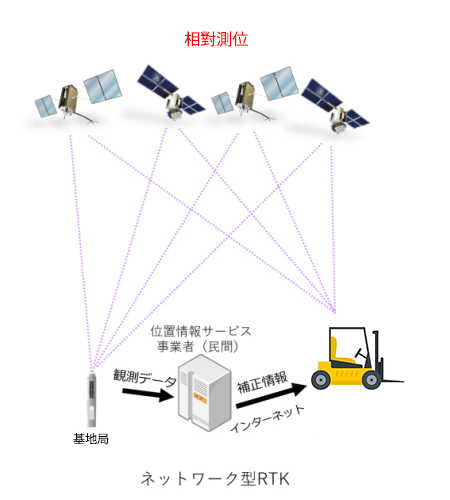
日本では全国1,300箇所の電子基準点があり、ソフトバンクによる独自基準点も3,300箇所設けられているため、諸外国の様に利用者が独自に基準を設ける必要が無い。位置情報量に加え、信号搬送波の位相積算値データを使用し、リアルタイムで補正することによってセンチメートル単位での位置情報が提供されています。
なお、MoonFolkシリーズではネットワーク型RTKに対応しています。
PPP-RTK(精密単独測位型RTK)
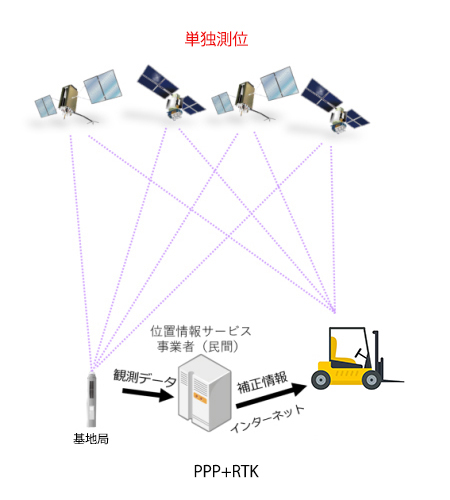
複数の衛星からの情報を1台のアンテナーで受信するPPP方式のカバー範囲の広さと、RTK方式の測位精度の高さの両者のメリットを併せ持ち、モビリティ性を高めた新しい高精度測位の方式。 従来のRTK方式と比べ使用するアンテナーの数が少なく、基準局の情報でリアルタイム高精度位置補正も実現可能。
なお、MoonFolkシリーズではPPP-RTKにも対応しています。
CLAS-シーラス(Centimeter Level Augmentation Service)
センチメーター級測位補強サービスとは、PPP-RTKの測位ずれをcm単位に矯正することができます。
CLASは、電子基準点L6信号による「みちびき」独自の国内向けサービスで、地上で補強情報を計算し、「みちびき」を経由してL6信号で配信。この補強情報を利用することでセンチメータ級の測位精度を実現する技術です。L6D信号は、GPSから配信している信号ではないため、専用の受信機が必要になります。
RTK測位は基準点から10km以上離れると誤差が大きくなるのが欠点ですが、CLAS(PPP-RTK)測位では基準点無しで測量することができ、基準点からの距離による制約がありません。また「みちびき」のセンチメータ級測位補強サービスは電波を受信できれば無料で利用することができます。インターネットに接続する必要がなく、衛星から直接補正情報を受信するため、インターネットに接続しにくい山間部や近海でも利用できます。
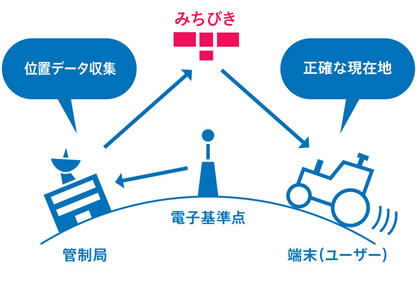
なお、MoonFolkシリーズではCLAS(PPP-RTK)にも対応しています。
PPP-高精度単独測位(Precise Point Positioning)の基本
PPP測位の距離計算式

理論上、電波到達時間(GPS衛星→受信側)× 電波速度(光速度)= GPS衛星からの距離ですが、しかし実際は衛星から受信側に到達まで、様々な要因で誤差を生じてしまいます。GPSの位置誤差はおおよそ数メートルですが、極端に条件が悪い場合は100m以上の誤差を起きることもあります。上記の式は衛星kから地上iの場所までの測位時に用いる一般的な数式ですが、記号の意味を下記の表にまとめました。
  |
測位距離 | 衛星kから地上iの場所 |
|---|---|---|
 |
実際の距離 | 衛星kから地上iの場所 |
| 光の速度 | 300000㎞/s | |
  |
受信機と衛星のタイミング誤差 | 1~2m程度 |
 |
衛星軌道情報の誤差 | 1~4m程度 |
 |
対流圏誤差 | 3m程度 |
 |
電離層(イオン層)誤差 | 2~20m程度 |
| 衛星kと受信器iのハードウエア誤差 | 2m程度 | |
| 偶発による測定誤差 | 30cm以内 |
上記の表のように、測位精度に影響を及ぼす原因はいくつかありますが、とりわけイオン層が測位精度に対する影響が大きいため、日本のみちびきはこの誤差を解消するための補強電波を送信することで本来の位置精度へと近づけ、精度向上を実現しています。
なお、MoonFolkシリーズではQZSSのL1/L2/L5/L6(CLAS)にも対応しています。GPS+みちびきの信号をまとめて受信可能。
docomo IoT高精度GNSS位置情報サービス
インターネットRTK測位サービスと自動運転フォークリフトの構成図

M22チップ搭載GNSS受信モジュール
M22モジュールは、bynav社の新世代22nmプロセス高性能車載グレードGNSS SOCチップAliceをベースにしており、高精度測定エンジン、ナビゲーション・エンジン、慣性ナビゲーション・ユニット、機能安全エンジンを内蔵しています。
スペック
| 対応衛星 | GPS、BDS、GLO、GAL、QZSS、IRNSS |
|---|---|
| 衛星追尾チャンネル | 1507 |
| 受信衛星システム | L-Band |
| CLAS | |
| BDS:B1I、B2I、B3I、B1C、B2a、B2b(PPP) | |
| GPS:L1CA、L1C、L2C、L5 | |
| GLO:G1,G2 | |
| GAL:E1、E5a、E5b、E6 | |
| QZSS:L1CA、L1C、L2C、L5、L6(PPP) | |
| IRNSS:L5 | |
| SBAS:L1CA、L1C | |
| 受信感度 | 衛星捕捉: ≧ -144 dBm |
| 衛星追尾: ≧ -154 dBm | |
| 干渉防止 | 単一周波数、マルチパス、狭帯域、掃引周波数、インパルス信号、S/N:65 dBc |
| DR補正精度 | 0.2% |
| 水平測位精度 | PPP:1.5M |
| RTK:1.0 cm + 1 ppm | |
| 高さ測位精度 | PPP:2.5M |
| RTK:1.5 cm + 1 ppm | |
| RTK初期化時間 | ≤5s |
| 外部I/O | UART、SPI、RMII、CANFD、Wheel tick、ANT_DETECT、GEOFENCE、PPS、RMII、FuSa、EVENT_IO |
| 適応温度 | -40℃~105℃ |
| ISO | ISO26262 ASIL D、ISO 26262 ASIL B |
| 認証 | AEC-Q100、RoHS、FCC、IC、CE、UKCA、REACH、AEC-Q104 |

全システム、全周波数GNSS信号の受信と解析をサポート。完全な監視及び測定と部分的ファジー解析アルゴリズムを内蔵したbynav社 REAL(Ransac Enhanced Advanced Location)GNSS測位エンジンを採用し、都市環境におけるマルチパスや干渉条件下でのエラー耐性と修正成功率を向上させ、測位解決結果はより強固になります。
- - 22nm GNSS SOCチップ ALICE
- - フルシステム全周波数GNSS (1507チャンネル)
- - L-BAND衛星ベースのエンハンスメント
- - NRTK/PPP/PPP-RTK/CLASをサポート
- - アンチジャミング、アンチスプーフィング
- - AEC-Q104
- - ISO 26262 ASIL B
- - 豊富な周辺インターフェース

高性能干渉防止GNSS測定・測位エンジン。
強化された安全機能とネットワークセキュリティのニーズに対して、SAIF(Smart Advanced Interference deFense)高性能複合干渉抑制技術を内蔵し、優れたS/N性能(65dB)を有し、周波数スイープ、単一周波数、マルチパス、ナローバンド、インパルスなどの干渉スタイルのアンチジャミング処理をし、車両追跡装置などの一般的な干渉信号に対応しています、 また、レーダー/信号塔などの一般的な干渉信号に対して、高い量子化数で信号前処理と干渉抑制を行うことができ、車両(ロボット)における高精度測位の使いやすさと完全性を大幅に向上させます。

LバンドCLAS衛星ベースのエンハンスメントとNRTK/PPP/PPP-RTKに対応。
Lバンド衛星を利用したPPP測位機能に対応し、従来のディファレンシャルサービスや移動体通信サービスではカバーできない環境でも高精度な測位が可能です。 BeiDou 3 B2b PPPソリューション、QZSS CLAS PPP-RTKソリューション、メインストリームPPP-RTKディファレンシャルサービスに対応。 BeiDouクワッドバンド信号とGalileoクワッドバンド信号をフル活用し、PPPコンバージェンススピードを大幅に向上させ、高精度測位の可用性を高めます。

ASIL B機能安全レベルをサポート
ISO26262 ASIL B機能安全設計に基づき、機能安全GNSSチップ(bynav Aliceチップ、機能安全要件に基づく新アーキテクチャ設計)と機能安全アルゴリズムを内蔵しています。 自動運転車や自律走行ロボット向けに、システムレベルの機能安全で高精度なPVTを提供しています。
実測データ
MoonFolkシリーズのロボットで実際にテストを行ったところ、下記の写真のように、RTKの信号が良好の場合、位置決め誤差が15mm以内に実現しています。また、10㎞以上離れたところのRTK基地局を使用したところ、誤差が50mm以上出ることもあります。

MoonFolkシリーズのロボットは現在インターネットRTK+GNSSの測位方式で運営していますが、近くに基地局がないあるいは基地局から離れたところで運営する場合、運営場所に基地局を建ててRTK+GNSSの方式で運営することで測位精度が大きく上げることができます。また、内蔵しているモジュールでGPS+みちびき+CLASやBeidouの4衛星方式、Galileoの4衛星方式など、あらゆる測位方式に対応しているため、山奥や港湾などでも受信方式を変えることで対応できます。
室内と屋外のマップ①
室内の点群マップと屋外の点群マップ、MoonFolkシリーズは3Dライダーで室内の環境をスキャンしてマップを自動的に生成します、そのまま外に出た場合、周りに建物などがある場合、同じく3Dライダーで環境をスキャンをし、室内マップの範囲をそのまま広げて行くことができます。3Dライダーが16ラインで半径150M、広い範囲で点群マップを取得することができます。また、こちらで取得したマップは1つの点群マップになりますのでマップ上のxyの座標は室内も屋外も正確に捉えることができ、且つ室内屋外の走行は同じマップ内であるため、境界線で停止することがありません。

室内と屋外のマップ②
こちらは室内点群マップと屋外GNSSのマップになります。境界線上にある点CとDは室内マップ上のXY座標と屋外GNSSマップの座標値、両方を持ち合わせています。ロボットが境界線を乗り越える際、ナビゲーション方式が変わるため、数秒間停止することがあります。
